Harvard researchers create soft, tentacle-like robot gripper
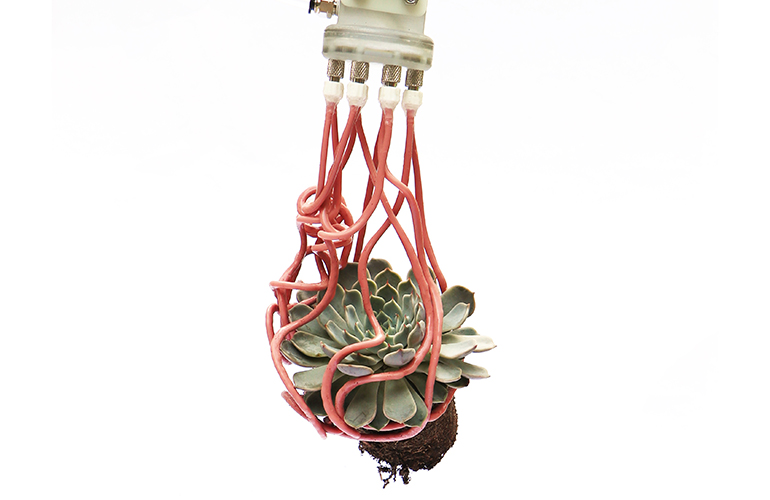
Harvard’s tentacle-like gripper wrapping around a succulent. | Source: Harvard Microrobotics Lab/Harvard SEAS
Researchers at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have created a tentacle-like gripper that can grasp irregularly shaped or soft objects without damaging them.
The gripper is made up of many thin, soft tentacles that rely on inflation to wrap themselves around an object without any sensing, planning or feedback control. Individually, each tentacle is too weak to pick up many objects, but with many working together the gripper can gently lift heavy and oddly shaped objects.
Each tentacle is made up of a foot-long hollow, rubber rubes. The tubes are made with thicker plastic on one side, so that was the tube is pressurized it curls like a pigtail. As the tube curls, it wraps and entangles itself around an object. Each added tentacle increases the strength of this hold. The gripper releases the object by simply depressurizing the tentacles.
When designing the gripper, the research team took inspiration from nature. The gripper’s tentacles act similarly to how a jellyfish stuns its prey.
To test how effective the gripper was, the research team used simulation and experiments where the gripper was tasked with handling a range of objects, including different houseplants and toys.
The team hopes that the gripper can be used to grasp fragile objects, like soft fruits and vegetables in agricultural production and distribution and delicate tissue in medical settings, as well as irregularly shaped objects, like glassware, in warehouses. The gripper could replace traditional grippers that rely on embedded sensors, complex feedback loops and advanced machine-learning algorithms to work.
The team’s research was published in the Proceedings of the National Academy of Sciences (PNAS). It was co-authored by Clark Teeple, Nicholas Charles, Yeonsu Jung, Daniel Baum and James C. Weaver, and supported by the Office of Naval Research, the National Science Foundation, the Simons Foundation and the Henri Seydoux fund.
The post Harvard researchers create soft, tentacle-like robot gripper appeared first on The Robot Report.
from The Robot Report - Robotics News, Analysis & Research https://ift.tt/9G3vXTw
via artificialconference



Comments
Post a Comment